Correlating Wavefront Sensor CWS
Optomechanisches Design Wellenfrontsensor
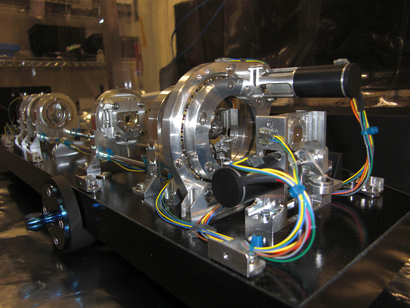

Die Komponenten des Wellenfrontsensors werden auf eine extrem leichtgewichtige Kohlefaser-Sandwichplatte montiert, die eine Dicke von rund 30 mm und eine Länge von 850 mm hat. Das Instrument wird mit drei isostatischen Halterungen mit der Instrumentenplattform von Sunrise verbunden. Die wesentlichen Komponenten des Wellenfrontsensors sind:
- Motorgesteuerte Bildfeldblende am Eingang des CWS, Wahl zwischen drei Zuständen: offen, geschlossen oder pinhole;
- Motorgesteuerter Graukeil zur Regelung der Helligkeit auf der Kamera;
- Mikrolinsenarray in der Pupillenbildebene zur Erzeugung von 6 identischen Teilbildern auf der Kamera;
- Linsenpaar zur Kollimation und Abbildung;
- Hochgeschwindigkeitskamera (CMOS).
Optomechanischer Design Tip-Tilt-Spiegel
Die Tip-Tilt-Spiegel-Einheit ist ein Teil des Servo-Regelsystems zur Bildstabilisierung, und wird ebenfalls vom KIS entwickelt. Herzstück ist ein kommerzieller Piezo-Antrieb mit einem Stellbereich von +/- 5 mrad (beim Sunrise-Teleskop entspricht dies +/- 50 Bogensekunden am Himmel).
Optomechanischer Design F2-Einheit
Im Hauptfokus des Teleskops (F2) befindet sich ein motorgesteuertes Blendenrad, mit dem drei verschiedene Bildfeldblenden in den Strahlengang gebracht werden können: offen (Normalposition), geschlossen, pinhole.
CWS Elektronik
Das nebenstehende Hardware-Diagramm zeigt in der oberen Reihe schematisch die wesentlichen optischen Teile des Teleskops, und im unteren Teil die wichtigsten elektronischen Komponenten zur Steuerung des Teleskops und seiner Instrumente. Die vom KIS gebauten Geräte sind gelb unterlegt.
CW-Com ist ein Mikro-Controller, der für die Kommunikation mit den übrigen Systemen des Teleskops zuständig ist. Er steuert bei Bedarf die Bewegung des Sekundärspiegels und gibt die Messdaten der Temperatursensoren an den Zentralrechner des Teleskops (Instrument Control Unit, ICU) weiter. Von dort werden die Informationen über Funk an die Bodenstation (EGSE-CW) geleitet, von wo auch bei Bedarf Steuerbefehle ans Teleskop geschickt werden.
CW-AO ist ein schneller Doppelprozessor-Mikrocomputer. Er liest die Hochgeschwindigkeits-Kamera des CWS mit einer Bildrate von 1700 Bildern pro Sekunde aus und berechnet die Stellparameter für den schnellen Kippspiegel (TipTilt), der mit einer Servo-Bandbreite von rund 55 Hz bewegt wird. Außerdem werden die Bildfehler Fokus und Koma berechnet. Bei Bedarf wird der Sekundärspiegel (M2) bewegt, um beide Aberrationen zu minimieren.